
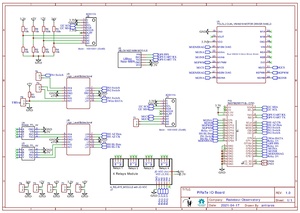
Hardware-Plattform der RT-Steuerung ist ein Raspberry Pi (Modell 4) welcher sich im Fuß des RT befindet und Anbindung an die Hardware durch kommerziell erhältliche Fertigkomponenten realisiert. Die OSHW-Seite von PiRaTe enthält die Details der Verschaltung.

Im Folgenden sind hier noch einmal die Features und die verwendeten Komponenten aufgeführt:
- Motorsteuerung durch ein Pololu Dual VNH5019 Motor Driver Shield (2 Kanäle)
- Zwei RS422-Konverter zum Anschluß von Industriestandard SSI Rotationsencodern
- Steckplätze für zwei ADS1115 I2C-ADC Break-Out-Boards für analoge Signale: Ein ADC zum Messen der Motorströme und zweier Feldstärkesignale sowie einer zur Überwachung von 4 Systemspannungen (3.3V, 5V, 12V and 24V) durch Spannungsteiler.
- Ein 40-pin GPIO pinheader interface zum RPi
- Ein GNSS-Empfänger Break-Out Board (basierend auf uBlox Chipsatz)
- Schraubklemmen zum Anschluß externer Signale und Spannungen sowie zum Debuggen
- Steckplatz für ein 4-Kanal Relais-Board
- Level-Shifter zum Unsetzen der Spannungspegel zwischen 5V und 3.3V GPIO-Signalen des RPi
- Anschluß von 1-Wire und digitalen I/Os
Anschluß der Rotations-Encoder
Der Anschluß der beiden Encoder (Az: TR CE-65-M; Alt: Baumer GM401.Z51) ist entsprechend folgender Tabellen auf jeweils ein CAT6 Netzwerkkabel vorgenommen:
| Nr. | Signal | Color Encoder | Color CAT6 | Pair CAT6 |
|---|---|---|---|---|
| 1 | T- | white | white | white/brown |
| 2 | T+ | brown | brown | |
| 3 | D+ | green | beige | white/beige |
| 4 | D- | yellow | white | |
| 11 | VCC | white/pink | red+green | red/green |
| 12 | GND | red/blue | white+blue | white/blue |
| shield | shield |
| Nr. | Signal | Color Encoder | Color CAT6 | Pair CAT6 |
|---|---|---|---|---|
| 1 | T+ | blue | brown | white/brown |
| 2 | T- | purple | white | |
| 3 | D+ | beige | beige | white/beige |
| 4 | D- | yellow | white | |
| 9 | VCC | white/pink | red+green | red/green |
| 10 | GND | black | white+blue | white/blue |
| shield | shield |