
Positionsgeber Azimut und Elevation
| GM401.Z51 | ||||
|---|---|---|---|---|
| 101850464 | 011 | Takt+ | Takt- | |
| 10-30 VDC | 5%RW | Daten+ | Daten- | |
| 8192x4096 | Gray SSI | DV inv. | DVMT inv. | |
| www.baumer.com | V/R inv. | Null | ||
| UB | GND | |||
| - | Schirm | |||

| Typ: CE-65-M | TR-Electronic | SNr:R | 242877 |
|---|---|---|---|
| Schritte/Umdrehung | prog. | (max.4096) | |
| Umdrehungen | prog. | (max.4096) | |
| Artikelnummer | 110 - 00391 | ||
| Stebel./Version | 433 / V001 | ||
| Datenübertragung/Code | SSI / Prog. | ||
| Ausgangsstufen | RS 422 | ||
| Optionen: | Ser.Programm | ||
| Spannung: | 11-27V+/-10% | ||

Testaufbau 1 im Serverschrank der Sternwarte: --- nicht mehr aktiv ---

- Die beiden Multiturn-Absolut-Drehgeber sind jeweils über ein RS422-TTL-Konverter an einen RaspberryPI B+ angeschlossen.
- Über einen ULN2003 mit angeschlossenen Schrittmotoren können die Drehgeber in beide Drehrichtungen bewegt werden. 12 Steps entsprechen etwa einer Umdrehung der Drehgeber.
- Auf dem RaspberryPI B+ läuft ein Raspbian Buster
- die Python-Scripte zu Motorsteuerung und zum rudimentären Auslesen der Drehgeber befinden sich in /home/pi/scripting/
- Zugang von Außen über SSH-Verbindung: ssh pi@87.138.177.28 -p 22222
Testaufbau 2 lokal bei antrares:
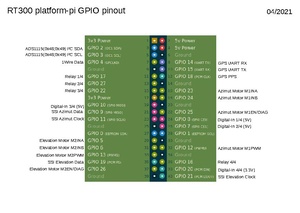
- platform-pi: RaspberryPI 4B 4Gb mit raspios_lite_armhf (32bit) Buster direkt von SSD gebootet
- Ein Dual VNH5019 MotorDriver Shield treibt Azimut- und Elevationsmotor mit 24V
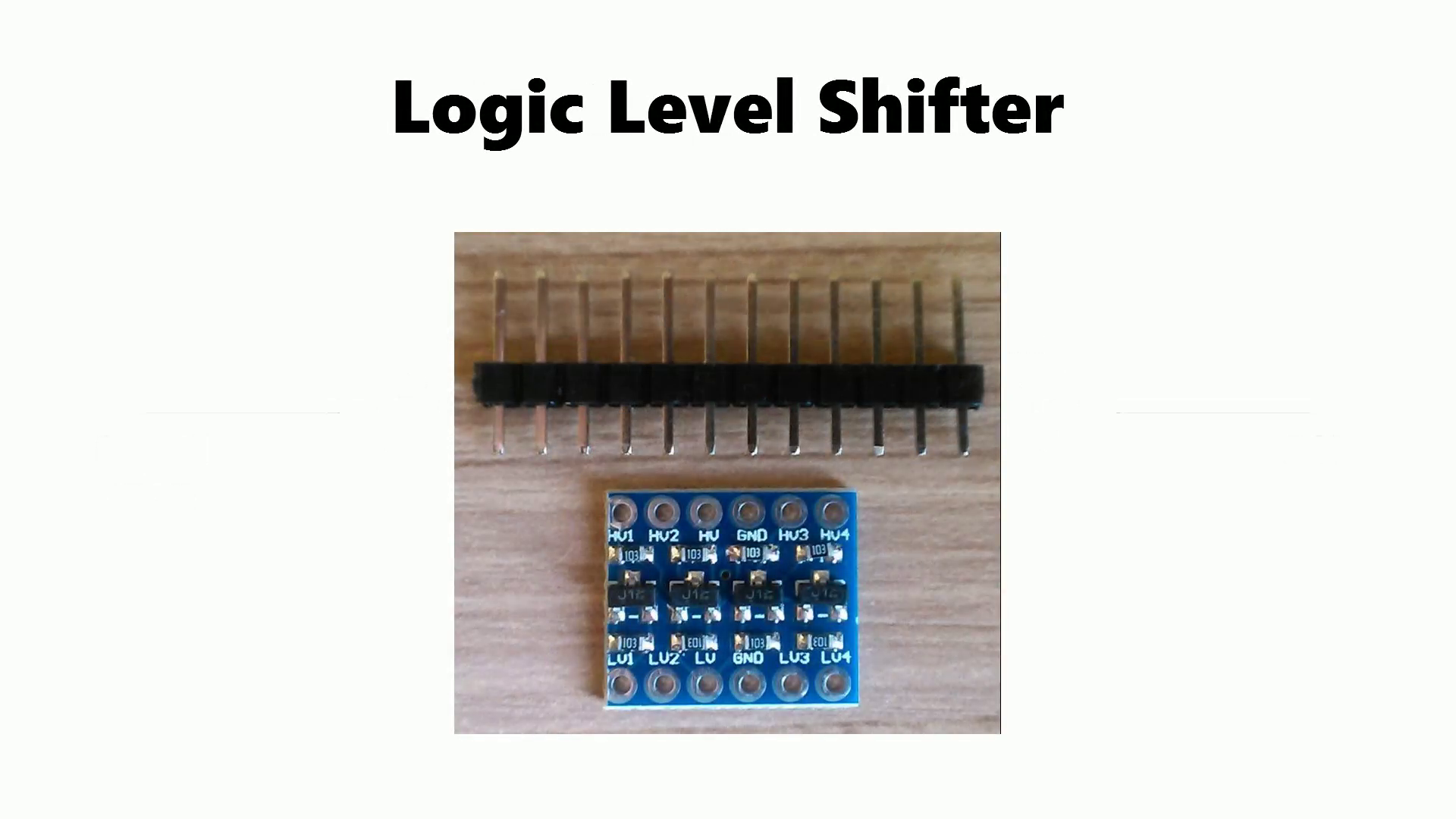
- Drei 1Wire-Temperatursensoren über logic level shifter (4Kanal Chinaware) im parasitären Modus (2-adrig) angeschlossen
- Zwei RS422-TTL-Konverter über logic level shifter angeschlossen, zur Ansteuerung der beiden Drehgeber (Versuchsweise als logic level shifter einen TXS0108E eingsetzt, war aber nicht erfolgreich, daher wieder MOSFET verbaut)
- Zwei ADS1115 über I²C angeschlossen, Adresse 0x48 zum Monitoring der Motorströme und Adresse 0x49 zum Monitoring der Bestriebsspannungen 3,3V; 5V; 12V; 24V
- Ein GPS-Board mit MAX-M8Q-0
- Ein 4Kanal Relaismodul RELM-5
- Zugang von Außen über SSH-Verbindung:
- IPv4: 24.134.252.105
- IPv6: 2a02:8106:211:e9d0:e3d8:448:e8c4:7a65 (direkter Zugang nur zu SSH als Fallback, falls IPv4-Portweiterleitung nicht geroutet wird)
- SSH-Port: 44000
- INDI-Port: 44001
{kind=link}