* größer 90° El zur Vermeidung unnötiger Schwenkvorgänge im Zenit
* größer 90° El zur Vermeidung unnötiger Schwenkvorgänge im Zenit
* azimutal Süd +- 1 Drehung; Begrenzung zur Abwehr von Kabelverwindungen notwendig
* azimutal Süd +/- 0,55 Drehung; Begrenzung zur Abwehr von Kabelverwindungen notwendig
'''Referenzen''' zur Kalibrierung der Inkrementalgeber nach Wiederanfahren der Gesamtanlage aus dem Stillstand werden automatisch gesucht. Haken in kstars-Konsole setzen. (Internationale Vereinbarung Az=0=Nord) beachten.
'''Referenzen''' zur Kalibrierung der Inkrementalgeber nach Wiederanfahren der Gesamtanlage aus dem Stillstand werden automatisch gesucht. Haken in Indi-Konsole setzen. (Internationale Vereinbarung Az=0=Nord) beachten.
'''Korrekturwerte''' der Positionierung können bei Notwendigkeit über die kstars-Konsole eingegeben werden.
'''Korrekturwerte''' der Positionierung können bei Notwendigkeit über die Indi-Konsole eingegeben werden.
Version vom 26. Oktober 2009, 16:40 Uhr
Der Reflektor kann
mit einer Auflösung von 0,1° für die genaue Zuordnung der Rohdaten resp.
zur Vermeidung von ständigen und möglicherweise unnötigen Feinkorrekturen mit einem (von der Bedienkonsole aus einstellbaren) Mehrfachen dieses Wertes v.a. für Trackingbetrieb
gefahren werden.
Endabschaltungen zur Bediensicherheit liegen bei
etwas kleiner als 0° El, zugleich zur Freigabe der Bühne für Arbeiten am Feed
größer 90° El zur Vermeidung unnötiger Schwenkvorgänge im Zenit
azimutal Süd +/- 0,55 Drehung; Begrenzung zur Abwehr von Kabelverwindungen notwendig
Referenzen zur Kalibrierung der Inkrementalgeber nach Wiederanfahren der Gesamtanlage aus dem Stillstand werden automatisch gesucht. Haken in Indi-Konsole setzen. (Internationale Vereinbarung Az=0=Nord) beachten.
Korrekturwerte der Positionierung können bei Notwendigkeit über die Indi-Konsole eingegeben werden.
Eckdaten der Antriebe:
Az: Schneckentrieb Modul 6, Raddurchmesser ca.1m, ca. 144 Zähne, DC-Motor mit Pulsweitenmodulation
El: Reibrad, Angriffshalbmesser ca. 500mm, DC-Motor mit Pulsweitenmodulation
Eckdaten des Reflektors
Reflektor: Durchmesser 3m, f/d = 0,26, Oberflächengenauigkeit ausreichend bis 10GHz
Feed: Kumar VE4MA mit einfachem Skalar-Ring, einfache Polarisation, skaliert, Grundlagen hierzu, außerdem Berechnung mit Tabellenkalkulation zu öffnen
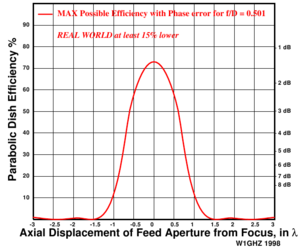
Auswirkungen axialer Versetzungen in der Praxis: Paul Wade USABeispiel: Signaldegradation vs. Effektivität, Beispiel-Feed. Beispiel ein Reflektor f/d=0,5. Für tiefere Reflektoren schlimmeres zu erwarten.