
Ulli (Diskussion | Beiträge) Keine Bearbeitungszusammenfassung |
Ulli (Diskussion | Beiträge) Keine Bearbeitungszusammenfassung |
||
| Zeile 37: | Zeile 37: | ||
* Feed: Kumar VE4MA mit einfachem Skalar-Ring, einfache Polarisation, skaliert, [[Media:high_efficiency_prime_feeds.pdf|Grundlagen]] hierzu, außerdem Berechnung [[Media:Feedhorn.xls|mit Tabellenkalkulation zu öffnen]] | * Feed: Kumar VE4MA mit einfachem Skalar-Ring, einfache Polarisation, skaliert, [[Media:high_efficiency_prime_feeds.pdf|Grundlagen]] hierzu, außerdem Berechnung [[Media:Feedhorn.xls|mit Tabellenkalkulation zu öffnen]] | ||
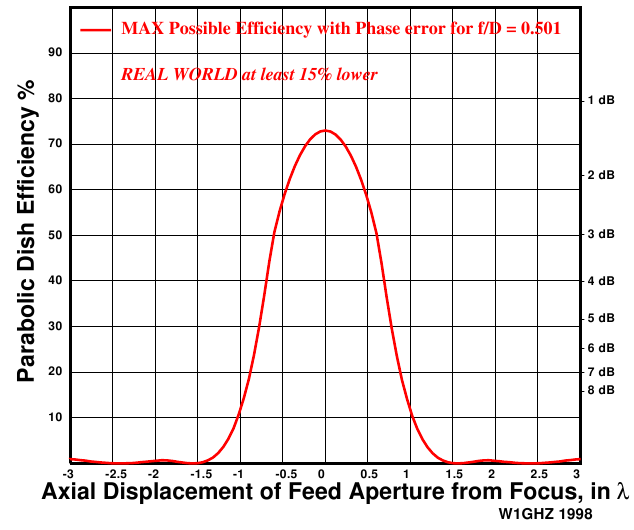
* Auswirkungen axialer Versetzungen in der Praxis: [[Media:Chap6-1b.pdf|Paul Wade USA]] | * Auswirkungen axialer Versetzungen in der Praxis: [[Media:Chap6-1b.pdf|Paul Wade USA]] [[Datei:Namenlos.png|Beispiel: Signaldegradation vs. Effektivität]] | ||
Version vom 26. Oktober 2009, 16:19 Uhr
Der Reflektor kann
- mit einer Auflösung von 0,1° für die genaue Zuordnung der Rohdaten resp.
- zur Vermeidung von ständigen und möglicherweise unnötigen Feinkorrekturen mit einem (von der Bedienkonsole aus einstellbaren) Mehrfachen dieses Wertes v.a. für Trackingbetrieb
gefahren werden.
Endabschaltungen zur Bediensicherheit liegen bei
- etwas kleiner als 0° El, zugleich zur Freigabe der Bühne für Arbeiten am Feed
- größer 90° El zur Vermeidung unnötiger Schwenkvorgänge im Zenit
- azimutal Süd +- 1 Drehung; Begrenzung zur Abwehr von Kabelverwindungen notwendig
Referenzen zur Kalibrierung der Inkrementalgeber nach Wiederanfahren der Gesamtanlage aus dem Stillstand sind bei ca. 45° El und 180° Az zu suchen. (Internationale Vereinbarung Az=0=Nord) beachten.
Korrekturwerte der Positionierung können bei Notwendigkeit über die kstars-Konsole eingegeben werden.
Eckdaten der Antriebe:
- Az: Schneckentrieb Modul 6, Raddurchmesser ca.1m, ca. 144 Zähne, DC-Motor mit Pulsweitenmodulation
- El: Reibrad, Angriffshalbmesser ca. 500mm, DC-Motor mit Pulsweitenmodulation
Eckdaten des Reflektors
- Reflektor: Durchmesser 3m, f/d = 0,26, Oberflächengenauigkeit ausreichend bis 10GHz
- Feed: Kumar VE4MA mit einfachem Skalar-Ring, einfache Polarisation, skaliert, Grundlagen hierzu, außerdem Berechnung mit Tabellenkalkulation zu öffnen
- Auswirkungen axialer Versetzungen in der Praxis: Paul Wade USA

--uKu 08:12, 20. Aug. 2009 (UTC)