
Weitere Optionen
Ulli (Diskussion | Beiträge) KKeine Bearbeitungszusammenfassung |
Hgz (Diskussion | Beiträge) |
||
| Zeile 101: | Zeile 101: | ||
Bild:NewFile3.bmp | Bild:NewFile3.bmp | ||
</gallery> | </gallery> | ||
Nach weiteren Schirmungsmaßnahmen und aktualisierter Firmware mit erhöhter Fehlertoleranz ist das RT nun wieder funktionsfähig. Trotzdem bitte weiterhin erhöhte Vorsicht v.a. bei nicht-manueller Positionierung walten lassen! | |||
Version vom 10. April 2011, 03:06 Uhr
Ab Revisionsphase im Sommer/Herbst 2009 hgz, and, uku
- Diese Seite gilt zukünftig als Logbuch anstelle der Papierform
| 2009 | 8 | 9 | 10 | 11 | 12 | 2010 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 2011 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |||||||
April 11
3./4.April
- Andreas hat den VV wieder mit den korrekten Spulen versehen und in funktionsfähigen Zustand gebracht. Feed sollte jetzt wieder voll einsatzfähig sein.
- Die Referenzumschaltung wird ab jetzt von einem FTDI-USB-Controller erledigt. Die Software (Datataker) wurde entsprechend angepasst und ins svn-repo eingecheckt. Damit alle Benutzer Zugriffsrechte für das USB-Device haben, wurde eine entsprechende udev-rule definiert (siehe Dokumentation im Sourcecode in radio/daq/atmel/datataker.cpp).
- Firmware für den ADC z.Zt. geflasht mit der aktuellen Version aus dem Repo. Diese benutzt einen schnelleren Moving-Average-Algorithmus, arbeitet jedoch bislang noch fehlerhaft (Stufen in den Messdaten in Vielfachen von 16 counts). Messungen sollten jedoch dessen ungeachtet bis zur Korrektur der Firmware trotzdem gemacht werden.
- Andreas hat die Kontakte des El-Motors gereinigt und festgezogen. Seither sind keine Aussetzer beim Fahren in El mehr beobachtet worden.
- Messungen mit aktueller Konfiguration hocherwünscht (Sonne, Horizont und Radioquellen)!
Nachtrag: erneute massive Verbindungsabbrüche beim Fahren in El beobachtet. V.a. beim Parken ist der Kontrollverlust reproduzierbar. Das dann in allen Achsen unkontrolliert fahrende RT konnte nur durch Notabschaltung des Radioiden gestoppt werden. Dadurch ist das RT momentan in der Endlage blockiert und muß manuell aus dieser bewegt werden. (hgz) -Nachtrag zum Nachtrag: Nach Start Radioid aus Endlage Nord remote gefahren --Ulli 07:54, 4. Apr. 2011 (UTC)
Sonnentransit 6. April
-
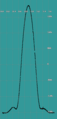 Transit mit Seitenkeulen, Hub nach Umbau deutlich verbessert
Transit mit Seitenkeulen, Hub nach Umbau deutlich verbessert -
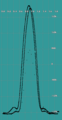 Zur Wiederholgenauigkeit einer Messung am gleichen Tag, Referenzposition angepasst
Zur Wiederholgenauigkeit einer Messung am gleichen Tag, Referenzposition angepasst


Sprünge an Geber Azimut 6. April
Beim Fahren im Bereich um 180° Az (nicht aber an dieser Grenze) springt der Geber nicht nachvollziehbar auf Nullposition. Fahrversuche eingestellt. Neustart Radioid nicht hilfreich.
Ergänzung von KDS:
der Bewegungszustand des RT (Videostream) und die Ausgabe von rt_ref vermitteln den Eindruck, das RT sei vom radioid getrennt. Habe Andreas via skype gebeten, dies zu prüfen.
Gebersprünge nochmal analysiert: Es scheint sich um ein sporadisches Auslösen der Referenzphase des Gebers zu handeln. Warum ist mir nicht ganz klar. Möglicherweise ist der Geber defekt. Evtl. ist auch die Schutzschaltung auf der AVR-Platine schuld. Bitte visuelle Inspektion sowie elektrische Prüfung vornehmen.
Sturm 8. April
Rt auf El 90°, Az ca. 270° gedreht des stark böigen Windes wegen. Beide Ref-Positionen waren verlorengegangen, die momentanen Anzeigen sind nicht nachvollziehbar --Ulli 19:03, 8. Apr. 2011 (UTC)
durch starke Windböe scheint das RT gegen die untere Endlage geschlagen zu sein, so dass es zwischen Anschlag und unterer Endlageposition eingeklemmt ist. Fahren nach Nord bricht sofort ab, da Endpos von unten ausgelöst wird. Da hilft wohl nur manueller Eingriff.
auf 90° El von Hand v.O. gefahren in guide mode --Ulli 08:06, 9. Apr. 2011 (UTC)
9. April
Arbeiten am NetIO, dritte Temperaturmesstelle -Sensor im ACR-Anbau- angelegt, Pins umgelegt am Modul nach Schaden, Umprogrammierung im Munin steht noch aus
Störungssuche an der Referenz Azimut. Starke Störungen bei offenem Deckel festgestellt -Cam wird streifenförmig gestört, siehe Bild.
-
 normale Erscheinung
normale Erscheinung -
 Aussehen bei geschlossener Box
Aussehen bei geschlossener Box -
 Bild mit Störung
Bild mit Störung



Referenz-Signal-Phase des Gebers oszillographiert bei Fahrbewegung , siehe Bild, Neue Version der Firmware aufgespielt



Nach weiteren Schirmungsmaßnahmen und aktualisierter Firmware mit erhöhter Fehlertoleranz ist das RT nun wieder funktionsfähig. Trotzdem bitte weiterhin erhöhte Vorsicht v.a. bei nicht-manueller Positionierung walten lassen!